Among all these different types of robot grippers, which works best for irregular heavy steel load? Mechanical gripper? Not necessarily. Take a look at the following application of customed
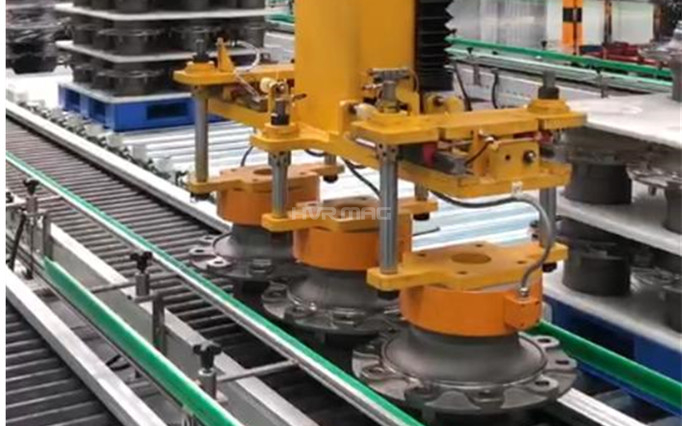
magnetic gripper, mounted on a cartesian robot depalletizing steel wheel hubs.
The above mentioned customed magnetic gripper, consists of 3pcs of HEPMP-D240 magnetic gripping heads, each for gripping one hub.
Depalletisation: picking 3 hubs in a row from a pallet, holding them, placing them onto the conveyor line for further processing.
How Does Magnetic Gripper Work?
The pick and place movements, are all realized by the magnetic gripping force released by permanent magnet materials inside, which was generated by electric pulse. In picking state, these magnetic gripping heads are switched on to pick up hubs; to release them, just switch them off by providing another electric pulse, the magnetic force disappears.
PLC programmable, integrated with cartesian robot, makes the depalletization more ACCURATE and EFFICIENT. If you're in need of a magnetic end effector for robotic handling of steel load, do not hesitate to
contact us!