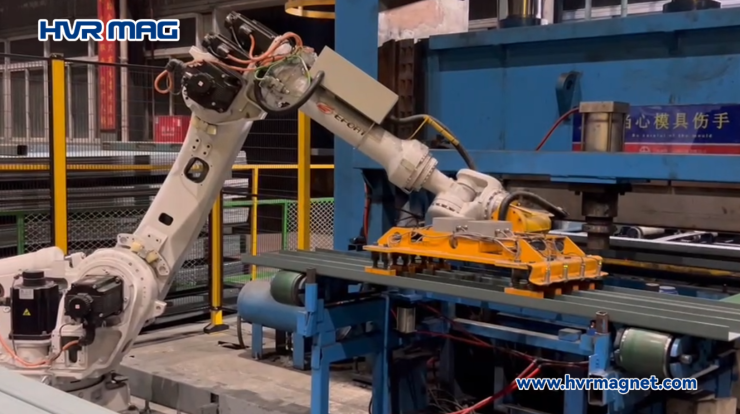
End effector grippers are used in a wide range of industrial robot applications. They are the core components used in conjunction with industrial robots to perform specific tasks. They can perform many production steps such as material handling, sorting, assembly, etc. There are several types of end effector grippers: mechanical, vacuum and magnetic. You need to choose a different end effector for each application.
Features of different types of end effector grippers:
Mechanical gripper: Universal, can be adapted to different materials and shapes. However, careful consideration is required if a high level of surface integrity is required.
Vacuum gripper: No limit of material specific. However, there are restrictions on the shape of the workpiece. It can only be used to grip smooth, non-porous surfaces. It is suitable when a high surface finish of the workpiece is required. However, it has a weak gripping force.

Magnetic gripper: It is limited to ferrous workpieces and has a high gripping force. The shape of the workpiece is not required and the surface quality of the workpiece is not affected. It is the best choice when working with magnetically conductive workpieces.
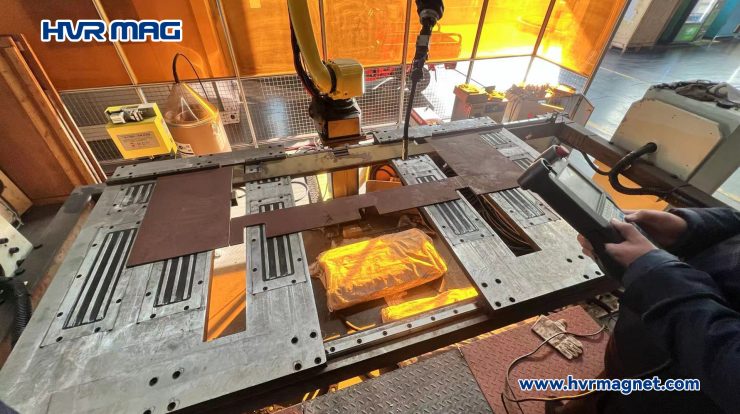
All end effector grippers need to be used under the right conditions to get the most out of it. HVR MAG is a manufacturer of magnetic end effector grippers. Many of our customers have shown us the importance of the right machining conditions for the end of arm tool. One of our customer uses a vacuum gripper to handle steel plates before. This is fine if the steel plate is thin and has a very clean and smooth surface. However, the problem was that the surface of the steel plates sometimes had contaminants such as cement residue on it, so the vacuum gripper was quickly worn out. The result was low safety and low productivity.
Specific issues to be fully considered when purchasing end effectors:
- Choosing the right end effector
Depending on your application, you should careful considerate of gripping force, gripping stroke, accuracy, weight and size of your chosen gripper. HVR can customise magnetic grippers with different sizes and suction forces.
- Control methods for end effectors
Not all end effector grippers will be compatible with your existing robotic system. For example, pneumatic end effectors require a compressed air unit. If you are purchasing an end effector that requires electrical control, power consumption and heat dissipation are also factors to consider.
HVR’s magnetic grippers use electronically controlled permanent magnets, where the magnetic force comes from the internal permanent magnet material rather than from copper coils. Electricity is only used when gripping and releasing the workpiece, so there is no need to worry about high power consumption. Of course, there is also no need to worry about high heat generation due to prolonged electrical power.
- Maintenance
If you purchase a vacuum gripper, you will need to replace the rubber seal periodically. Mechanical grippers must be checked frequently if there are loose or broken structures. Magnetic grippers must be maintained with clean magnetic pole surfaces.
Choosing the end effector grippers in conjunction with an industrial robot can help you automate your production and increase efficiency. If your product is made of a magnetically conductive material, then we highly recommend the magnetic gripper – HVR’s magnetic grippers are powerful and energy efficient. It takes only 0.2-2 seconds to pick up and release the workpiece. No damage to the product surface. Low maintenance costs. It will meet all your expectations.
Please contact us for more information: export@hvrmagnet.com